Test rotacji synchronicznej BSMH nr 3 skojarzonego w czteroramienną gwiazdę VID 20231123 125932
Автор: Zygmunt Kiliszewski
Загружено: 2023-11-23
Просмотров: 4589
Описание:
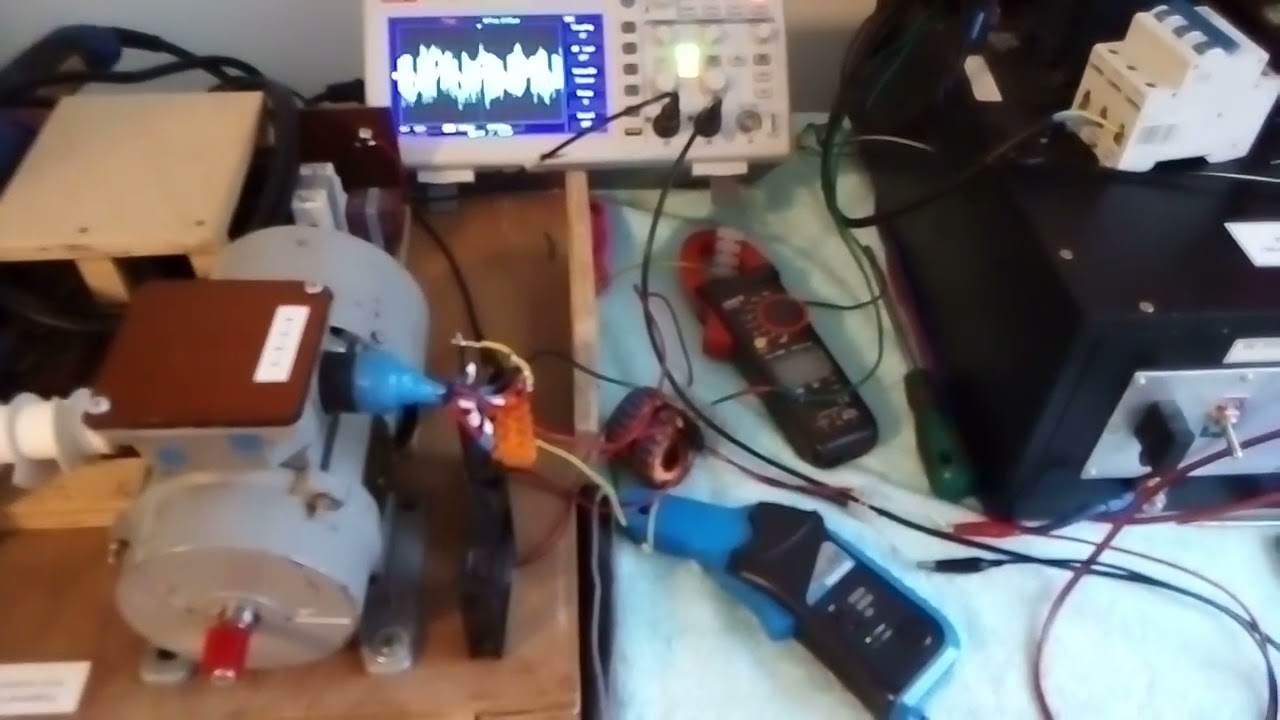
Wprowadzono na obroty synchroniczne Bezszczotkowy Szybkoobrotowy Motor Hybrydowy nr 3 [Brushless Hybrid Fast - Rotation Motor], którego cztery uzwojenia fazowe skojarzono w czteroramienną gwiazdę. Linia sterująca [L2 - L4] jest zasilana prądem jednofazowej funkcji (zbliżonej do sinus) generowanej przez skalarny przemiennik częstotliwości [U/f] XSY - AT 1//1,5 kW poprzez dławik FERYSTER o indukcyjności 330 μH/10 A. Ustawiono następująco kody systemowe przemiennika: P00 = 220 V; P01 = 130 Hz; P02 = 118 V; P03 = 67 Hz; P04 = 20 V; P05 = 0,0 Hz; P06 = 134 Hz. Silnik rozpędzono, we wstępnej fazie, w trybie automatycznego przyspieszania do rotacji 60,3 Hz = 3,618 kRPM. Dane testu:
A. Tablica Parametrów Ch1 (sonda oscyloskopu): f = 6,95 kHz; Rise = 11,80 ms; Fall = 8,40 ms; Width (plus) = 60,00 μs; Width (minus) = 70,00 μs; Overshoot = 12,7 %; Preshoot = 7,3 %; Duty (plus) = 46,2 %; RMS = 134,28 V; High = 188,00 V; Low = - 252,00 V; Max = 244,00 V; Min = - 284,00 V; Amplituda = 522,72 V.
B. Tablica Parametrów Ch2 (sonda prądowa Hantek): f = 60,27 Hz = 3,616 kRPM; T = 16,59 ms = 0,01659 s; Rise = 6,20 ms; Fall = 5,80 ms; Width (plus) = 6,36 ms; Width (minus) = 8,85 ms; Overshoot = 13,5 %; Preshoot = 3,8 %; Duty (plus) = 41,8 %; RMS = 326,80 mV = 3,27 A; High = 500,00 mV; Low = - 540,00 mV; Max = 640,00 mV; Amplituda = 1,21 V.
C. Obliczenie kąta wyprzedzenia prądu względem napięcia: ΔT = 2,00 ms = 0,002 s; T = 0,01659 s = 360 stopni; 0,01659 s * x = 0,72; x = 43,4 stopnia; cos φ = 0,7266 = 0,73.
D. Obliczenie mocy (f = 60,3 Hz): P = UI cos φ = 134,28 V * 3,27 A * 0,73 = 320,54 W = 0,321 kW.
E. Oscylogram: a) napięcia: piki AC PWM generujące prąd funkcji zbliżonej do sinus); b) obciążenia: funkcja zmienna okresowo dążąca do trójkąta - z drganiami pochodzącymi od magnesów trwałych rotora i braku precyzji sterowania obciążeniem przez przemiennik. Prawdopodobnie zdefiniowana również kątem usytuowania biegunów magnetycznych równym 135 stopni (Sectio Aurea twornika) oraz zwiększoną jego indukcyjnością.
F. Oscylogramy obciążenia BSMH nr: 1, 2, 4, mrBSMH (mikromotor rdzeniowy skonstruowany od podstaw przez autora na bazie cewek zespolonych): a) napięcia według lit. "E"; b) obciążenia: bardzo zbliżona do SEM sinus (mniejsze indukcyjności, aniżeli ustalono w BSMH nr 3, co potwierdza wstępna analiza przytoczona w wymienionej literze).
G. Tablica Parametrów Ch1 (sonda oscyloskopu; rotacja 80,84 Hz): f = 7,19 kHz; Rise i Fall: brak danych; Width (plus) = 60,00 μs; Width (minus) = 70,00 μs; Overshoot = 12,7 %; Preshoot = 7,3 %; Duty (plus) = 46,2 %; RMS = 124,64 V; High = 244,00 V; Low = - 248,00 V; Max = 304,00 V; Amplituda = 578,16 V.
H. Tablica Parametrów Ch2 (sonda prądowa Hantek): f = 80,84 Hz = 4,85 kRPM; T = 12,37 ms = 0,01237 s; Rise i Fall: symetryczne; Width (plus) = 5,00 ms; Width (minus) = 4,63 ms; Overshoot = 13,3 %; Preshoot = 6,7 %; Duty (plus) = 51,9 %; RMS = 329,85 mV = 3,299 A; High = 620,00 mV; Low = - 580,00 mV; Max = 780,00 mV; Amplituda = 1,43 V.
I. Obliczenie kąta wyprzedzenia prądu względem napięcia: ΔT = 1,800 ms = 0,0018 s; T = 0,01237 s = 360 stopni; 0,01237 s * x = 0,648; x = 52,38 stopnia; cos φ = 0,61.
J. Obliczenie mocy (f = 80,84 Hz): P = UI cos φ = 124,64 V * 3,3 A * 0,61 = 250,9 W = 0,251 kW.
K. Oscylogram według lit. "E".
L. Dane porównawcze rotacji, współczynników mocy i obciążenia BSMH nr 3 według Testu XVI z dnia 19/20/21.11.2023 r.: a) 7,015 kRPM, cos φ = 0,68; I obc. = 5,95 A; b) 7,492 kRPM; cos φ = 0,8447; I obc. = 5,1 A; c) 8,096 kRPM; cos φ = 0,918; I obc. = 3,48 A; d) 8,378 kRPM; cos φ = 0,827; I obc. = 4,12 A.
Ł. Możliwość zasilania BSMH nr 3: a) dwufazowym przemiennikiem częstotliwości o kącie drugiej linii sterującej równym 90 stopni; b) czterofazowym przemiennikiem częstotliwości, którego sygnały fazowe są skojarzone w czworokąt lub czteroramienną gwiazdę; c) odpowiednim kontrolerem nadzorującym cztery kroki systemowe na obrót [mikrosensory indukcyjne lub świetlne (np. promieniowania podczerwonego lub laserowe); system ten spełnia kryteria funkcjonowania synchronicznego ze sprzężeniem zwrotnym].
M. Sygnał sterujący: a) na bazie f nośnej ≥ 15 kHz; b) opracowanym modelu Field Orient Control [FOC - sterowanie wektorowe prądem twornika] lub DTC/DTFC (bezpośrednie sterowanie momentem i strumieniem). Należy dążyć do opracowania sprzężenia wewnętrznego zależnego od kątowego położenia: a) rotora (jednym z nich jest system skonstruowany i zaproponowany przez autora); b) wektora przestrzennego strumienia skojarzonego twornika lub wektora magnetycznego wirnika; c) wektora napięcia.
N. Analiza usytuowania magnesów w rotorze silników synchronicznych typu BSMH [BLHF-RM]:
tylko w systemie promieniowym (obwodowy wymusza kątową zmianę biegunowości !!!).
Uprzejmie zapraszam do analiz dalszych testów opublikowanych w Komentarzach niniejszego klipu, dziękuję :).
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:







![Doskonały test mocy i rotacji BSMH nr 3 [1,76 kW; 7,32 kRPM] - zasilany XSY-AT 1 VID 20211229 113418](https://image.4k-video.ru/id-video/X0xCjSnn5IU)











