Approximate hand-eye calibration with MVTec HALCON (stationary 2D camera)
Автор: mvtecsoftware
Загружено: 2019-01-31
Просмотров: 23092
Описание:
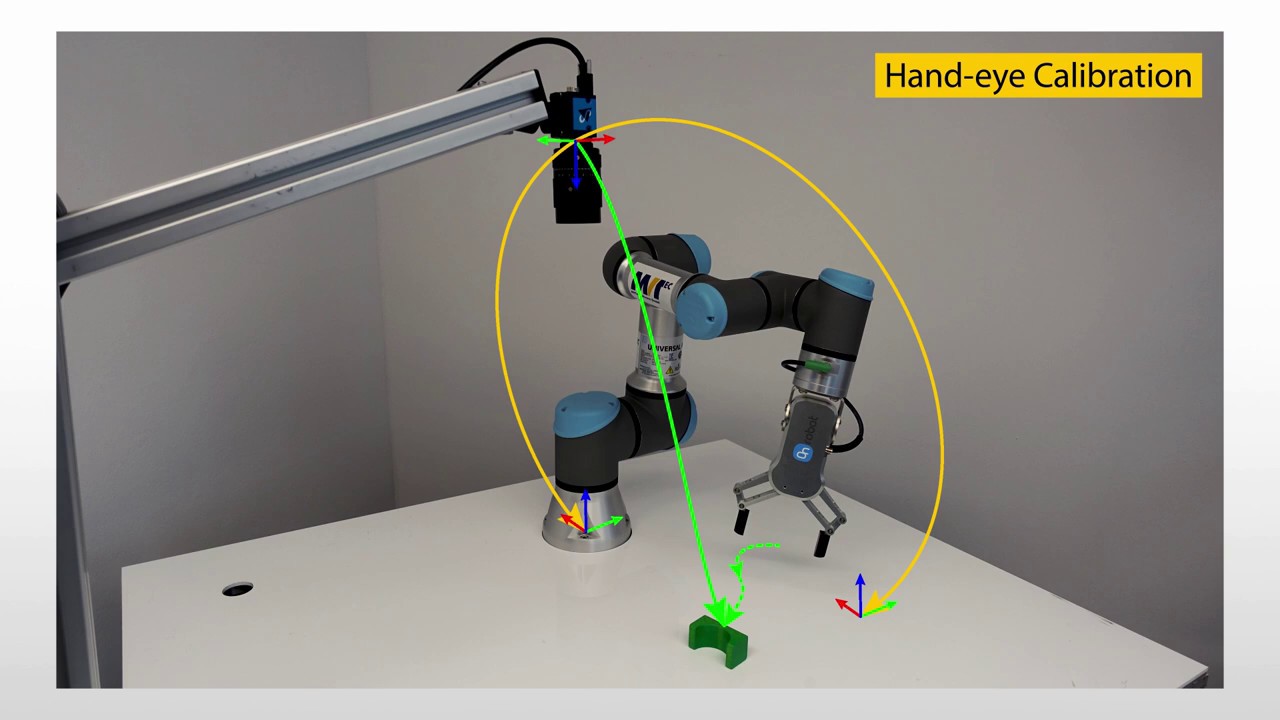
In this tutorial, we use HDevelop to perform a hand-eye calibration. This hand-eye calibration is necessary to pick and place objects, which are observed by a stationary 2D camera, with a robot. There are multiple ways to perform a hand-eye calibration with HALCON – in this video, we manually approach a calibration plate with the gripper of our robot and use these poses to get a correspondence of the camera coordinate system and the robot coordinate system.
Content
0:08 Theory & Background
1:05 Calibrate the touching point
2:20 Perform the hand-eye calibration
In this video, a nightly version of HALCON 19.05 is used.
http://www.mvtec.com/
http://www.halcon.com/
If you have any wishes or comments regarding our videos, feel free to use our video feedback form: https://www.mvtec.com/services-suppor...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: