Скачать
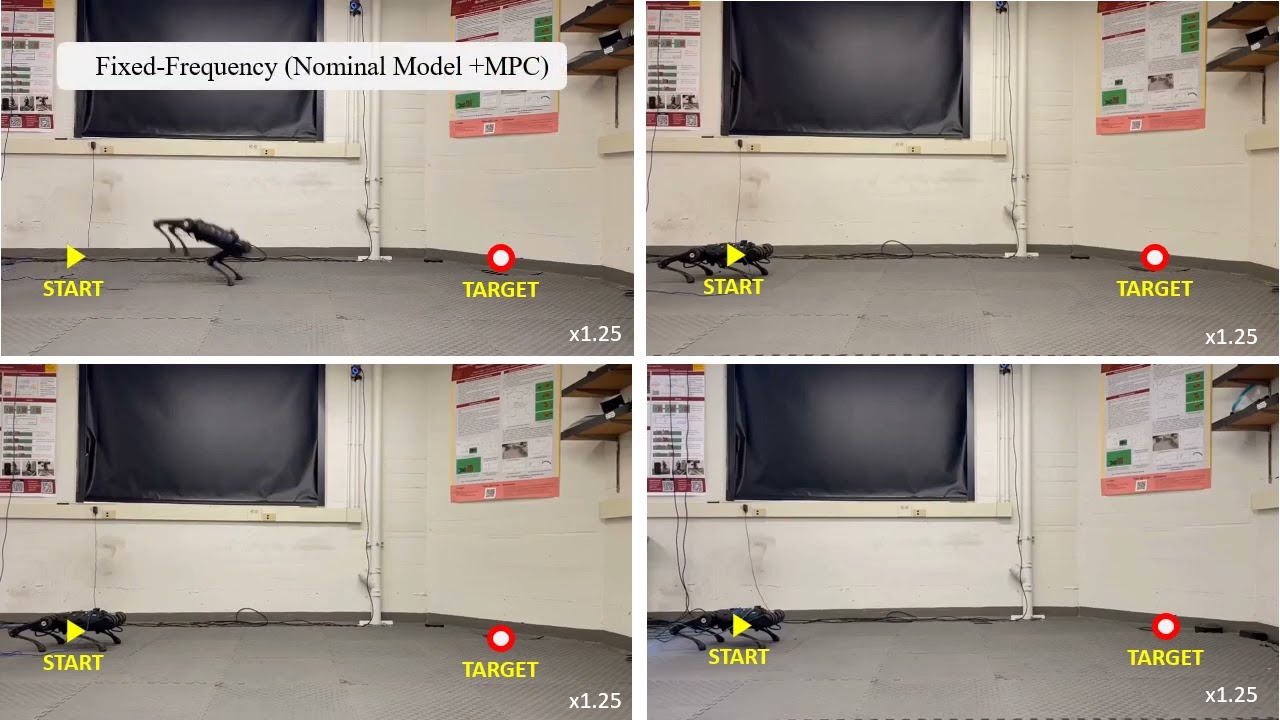
Hierarchical Adaptive Control for Collaborative Manipulation of a Rigid Object by Quadrupedal Robots
Автор: Dynamic Robotics and Control Laboratory
Загружено: 2023-09-09
Просмотров: 350
Описание:
IROS 2023 presentation for the paper "Hierarchical Adaptive Control for Collaborative Manipulation of a Rigid Object by Quadrupedal Robots."
Paper link: https://arxiv.org/abs/2303.06741
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:












![[ICON Spring26 Seminar] Ruqi Zhang (Purdue) #foundationmodels #probabilitytheory #AI](https://imager.clipsaver.ru/JEcknGDhhrQ/max.jpg)


