Autonomous Navigation: Training a Self-Driving Agent via Reinforcement Learning (PPO)
Автор: Harshitha Teki
Загружено: 2026-03-11
Просмотров: 11
Описание:
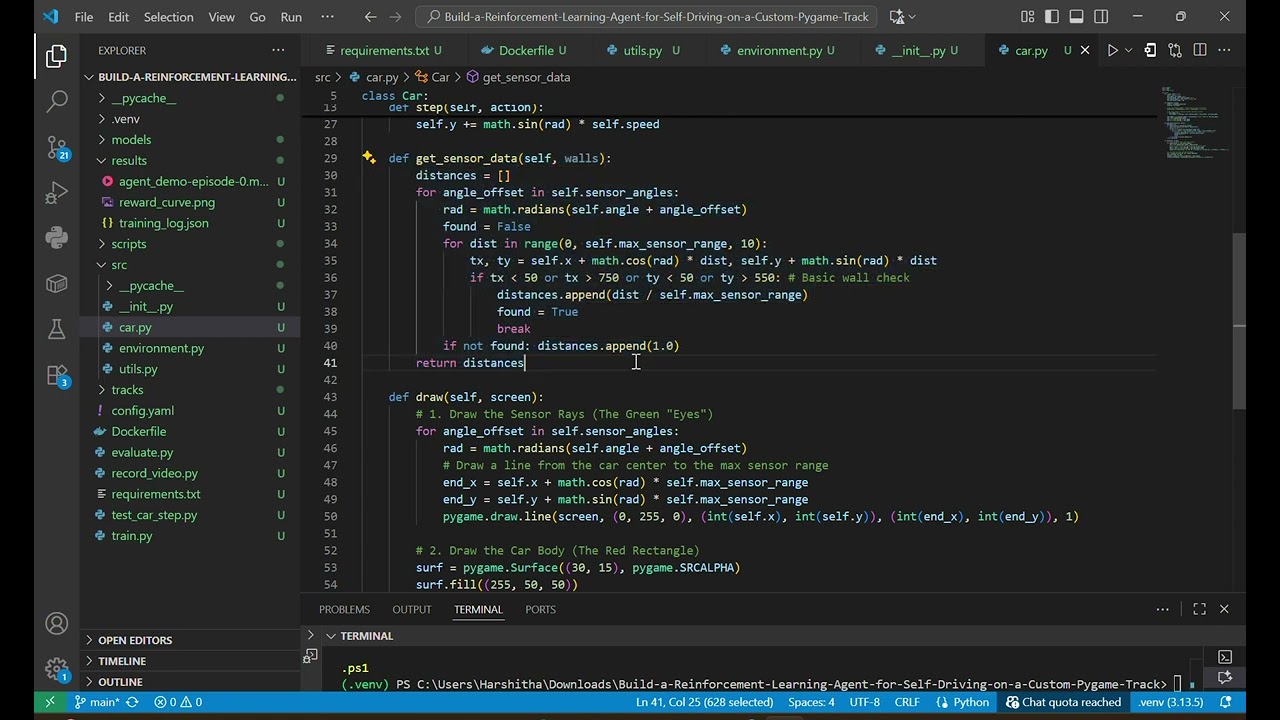
This video demonstrates a deep reinforcement learning agent trained to navigate a complex 2D environment using Proximal Policy Optimization (PPO).
📂 Source Code:
https://github.com/Harshitha-teki/Build-a-...
Technical Overview:
Algorithm: PPO (Stable-Baselines3)
Sensors: 5-Ray LiDAR-style distance sensors (Ray-casting)
Environment: Custom Gymnasium wrapper with Pygame rendering.
Logic: The agent maps continuous sensor inputs to steering and acceleration actions, optimized over 100,000 timesteps to maximize speed while avoiding collisions.
Built and containerized using Docker for reproducible AI research.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: