Comment programmer 💻 et raccorder l'Arduino ⚡ avec un Shield Moteur L293D ? Inversion sens rotation
Автор: Electrotoile
Загружено: 2019-10-21
Просмотров: 37760
Описание:
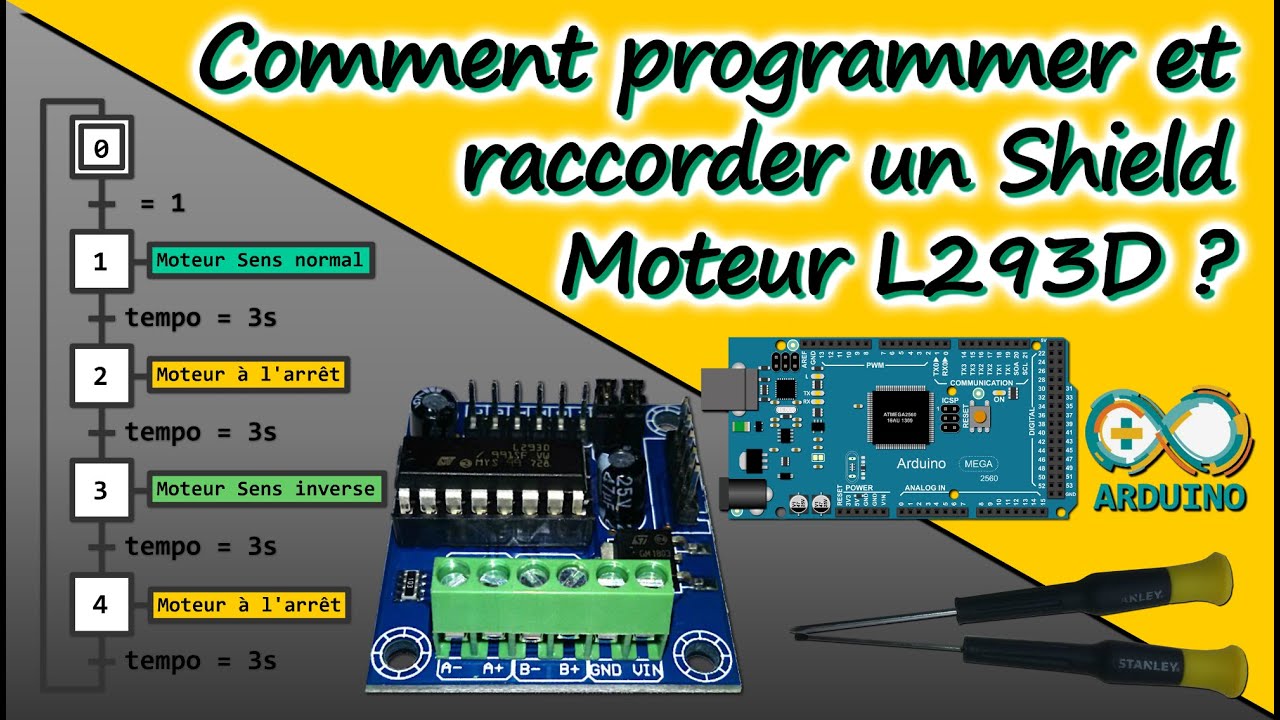
Principe de fonctionnement, raccordement et de programmation d'un Shield moteur L293D, permettant d'inverser de commander un moteur à courant continu DC et notamment en facilitant l'inversion du sens de rotation du moteur ↪️↩️ et en proposant la variation de vitesse. Dans cette vidéo, j'explique comment programmer une Arduino pour commander un moteur via le Shield Motor L293D pour réaliser l'inversion du sens de rotation d'un moteur à courant continu. Le câblage du circuit intégré est réalisé avec des fils volants. Retrouver davantage d'information sur la page https://electrotoile.eu/arduino-moteu...
---------------------------------------------------------------------------------------------------------------------------------------------------------------
Pour la réalisation du montage vous aurez besoin :
Shield Moteur avec circuit intégré L293D (https://amzn.to/3jxM7Mq)
Carte clone ou officielle Arduino en version Uno (https://amzn.to/33QpBk7) ou Mega (https://amzn.to/2MVqpgR).
Tournevis de précision (https://amzn.to/2J66b2Y)
Moteur à courant continu d'intensité maximale 0,6A ou 600mA
---------------------------------------------------------------------------------------------------------------------------------------------------------------
Programme à envoyer dans l'arduino pour contrôle le moteur DC via le Shield Moteur L293D :
int Moteur_sens1=4; // Pin 4 Arduino vers broche A+ du L293D
int Moteur_sens2=5; // Pin 5 Arduino vers broche A- du L293D
void setup() {
// On définit les bornes 4 et 5 de l'Arduino en sorties digitales
pinMode(Moteur_sens1, OUTPUT); // Pin 4 Arduino en sortie digitale
pinMode(Moteur_sens2, OUTPUT); // Pin 5 Arduino en sortie digitale
}
void loop() {
// Le moteur tourne dans le sens normal
digitalWrite(Moteur_sens1,HIGH); //Activation de la broche A+ du L293D
digitalWrite(Moteur_sens2,LOW); //Désactivation de la broche A- du L293D
delay(3000); // Attendre pendant 3 secondes
// Le moteur est à l'arrêt
digitalWrite(Moteur_sens1,LOW); //Désactivation de la broche A+ du L293D
digitalWrite(Moteur_sens2,LOW); //Désactivation de la broche A- du L293D
delay(3000); // Attendre pendant 3 secondes
// Le moteur tourne dans le sens inverse
digitalWrite(Moteur_sens1,LOW); //Désactivation de la broche A+ du L293D
digitalWrite(Moteur_sens2,HIGH); //Activation de la broche A- du L293D
delay(3000); // Attendre pendant 3 secondes
// Le moteur est à l'arrêt
digitalWrite(Moteur_sens1,LOW); //Désactivation de la broche A+ du L293D
digitalWrite(Moteur_sens2,LOW); //Désactivation de la broche A- du L293D
delay(3000); // Attendre pendant 3 secondes
}
---------------------------------------------------------------------------------------------------------------------------------------------------------------
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:



















