Dynamic balance compensation with wearable dual-arm SRLs
Автор: Erick A. Padilla García
Загружено: 2026-02-08
Просмотров: 7
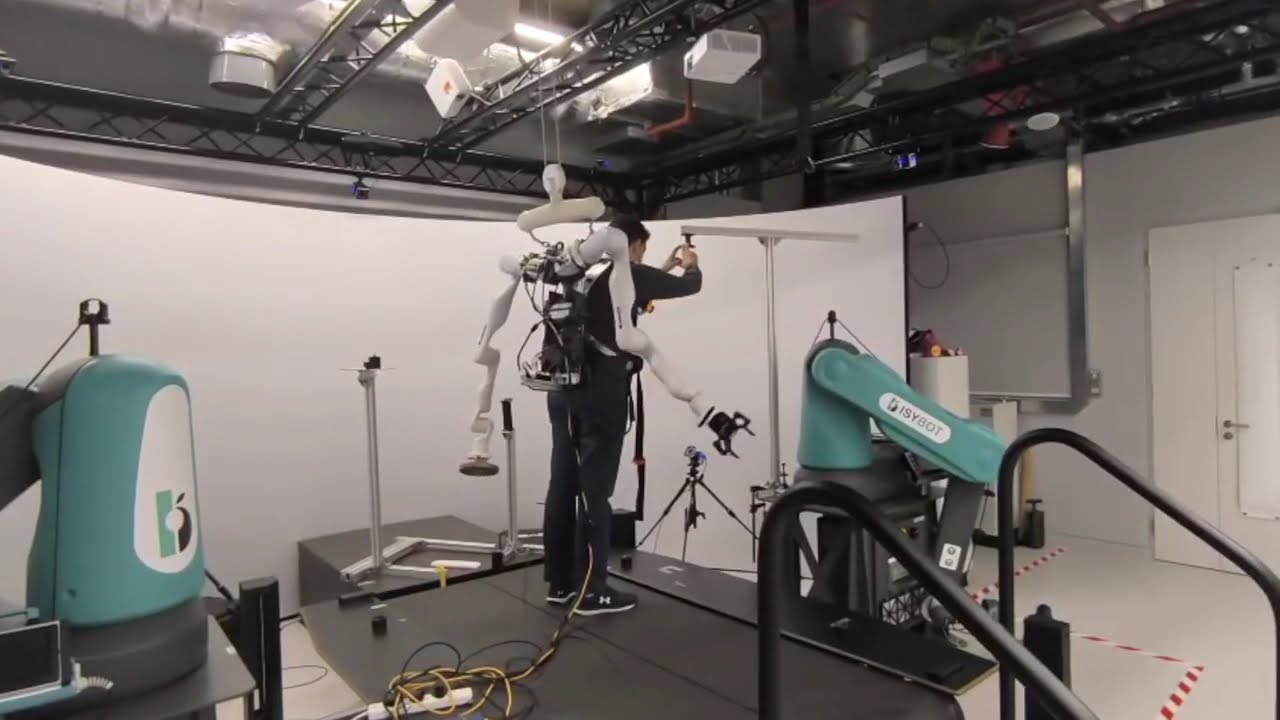
Описание: illustrates the experimental platform, which consists of a wearable backpack fitted with two Kinova Gen3 collaborative robots (cobots). The Cartesian movements of both the cobots and the human participant are monitored using reflective markers and Vicon motion capture technology. The positions and velocities of the joints, along with the corresponding control actions, are transmitted through the Kinova C++ API. Additionally, force sensors are mounted on two independent boards—one per foot—within the Motek treadmill. This treadmill is integrated with both the Vicon system and the Kinova API. The treadmill is activated to create translational movement of the human trunk under both frontal and lateral compensation conditions, facilitated by communication among the C++ API, ROS 2 nodes, and the treadmill system
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: