Скачать
Safe and Flexible Navigation in Formation in Structured Environment
Автор: Jose Miguel Vilca Ventura
Загружено: 2015-06-17
Просмотров: 39
Описание:
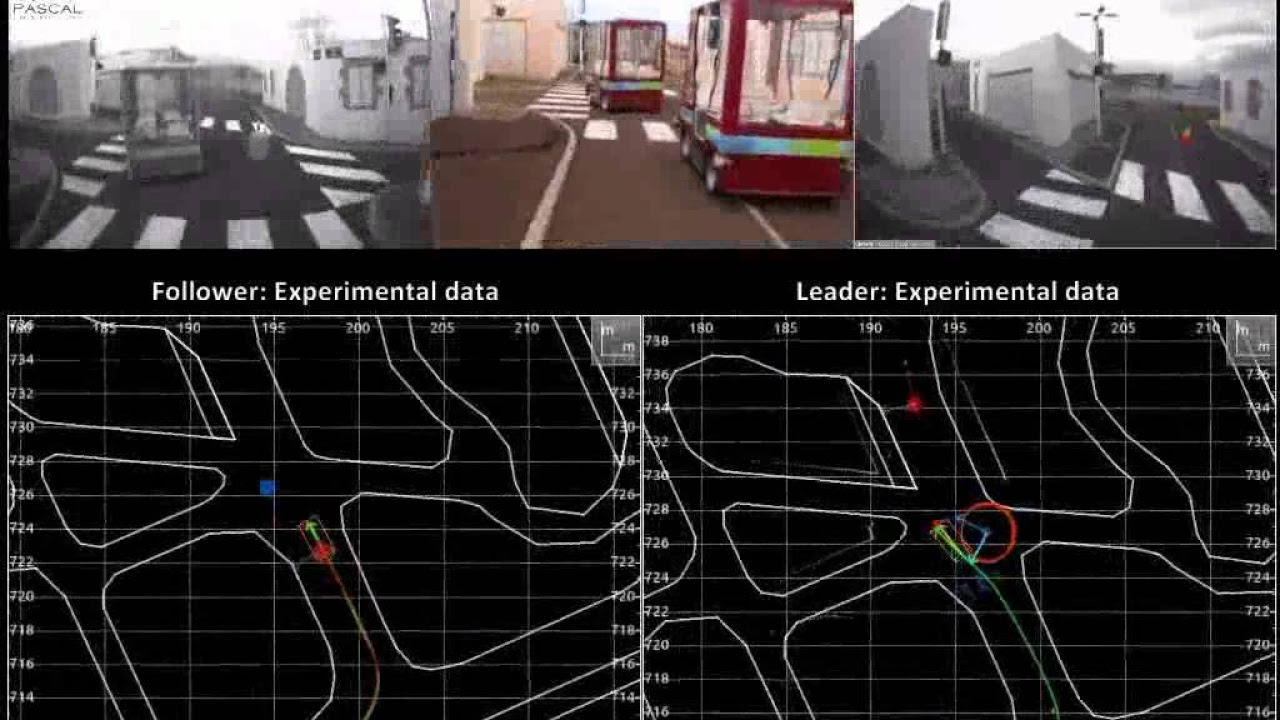
This video shows the application of the proposed control strategy based on target-reaching for a safe and flexible Leader-follower navigation of two electric vehicles (VIPALAB).
This work was done at Institut Pascal in Clermont-Ferrand, France by the MACCS team and was supported by the French National Research Agency (ANR) through the SafePlatoon project and LABEX IMobS3.
Researchers: Jose Vilca, Lounis Adouane and Youcef Mezouar
email: [email protected]
For more details visit: http://maccs.univ-bpclermont.fr
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:









