[Webcast] - Modeling and Simulation for Wearable Robots
Автор: AnyBody Technology
Загружено: 2016-08-11
Просмотров: 9031
Описание:
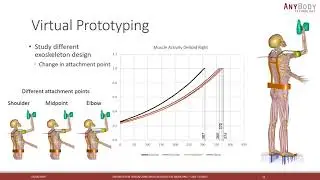
Exoskeletons hold an obvious potential to assist and enhance human abilities in many ways. What is not as apparent is how to design optimal human-exoskeleton interaction. How can we improve exoskeleton design to capitalize on human anatomy and ability? Synergistic human-robot interactions can be explored in AnyBody Modeling System™, which can revolutionize the approach to human-centered design.
This webinar examines the use of the AnyBody Modeling System™ for in-silico design and evaluation of wearables robots. This work received funding from the European Union's Horizon 2020 research and innovation programme under Grant Agreement no. GA-680754 (The MovAiD project, http://www.movaid.eu).
Presenters: Mohammad S. Shourijeh and Moonki Jung, AnyBody Technology
Повторяем попытку...
![[Webcast] - Modeling and Simulation for Wearable Robots](https://imager.clipsaver.ru/3KARJUT1pps/max.jpg)
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:
![[Webcast] - How does human gait respond to muscle impairment in TKA patients?](https://image.4k-video.ru/id-video/rbA75WfZHY4)