Distributed Multirobot Task Assignment via Consensus ADMM
Автор: IEEE Transactions on Robotics
Загружено: 2023-07-06
Просмотров: 336
Описание:
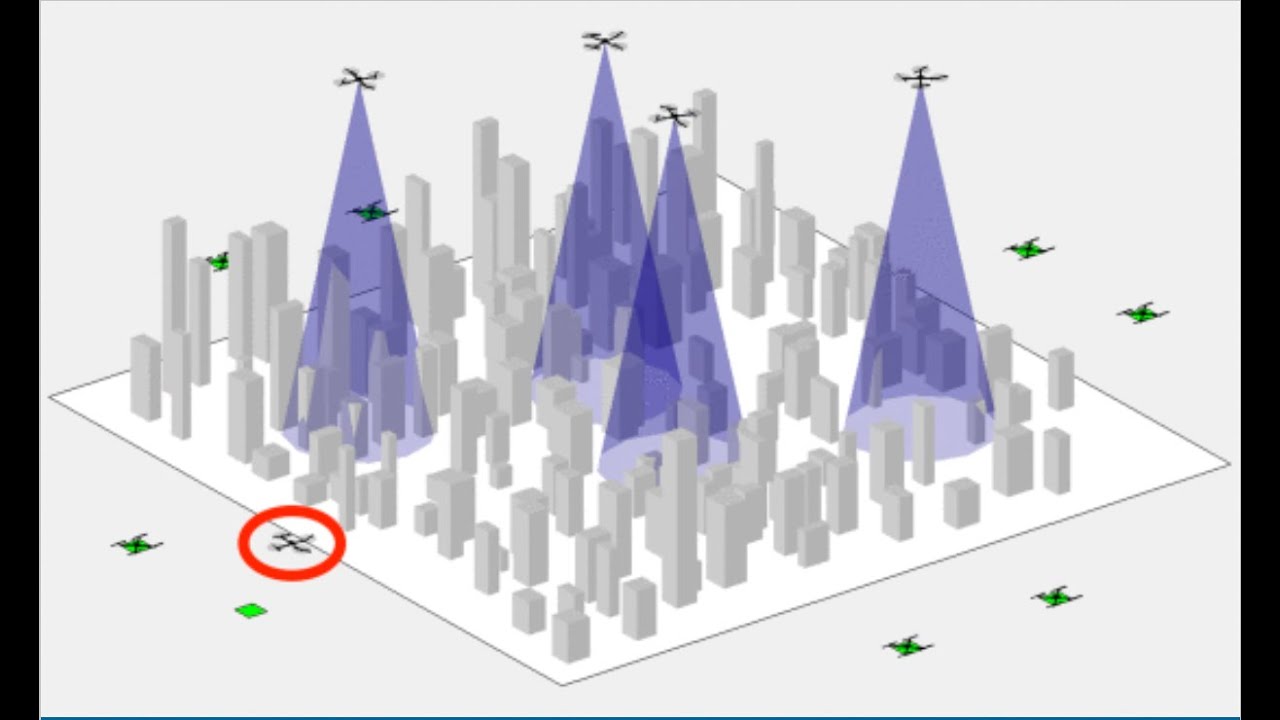
Imagine a team of robots, all expertly assigning tasks among themselves without a central command. Thanks to the C-ADMM-based algorithm developed by researchers #StanfordEngineering described in a recent T-RO paper, this isn't sci-fi anymore! It's like a super-efficient, autonomous robot office, but cooler 🤖💼🎯
#AI #Robotics #Efficiency
https://ieeexplore.ieee.org/document/...
Paper title: Distributed Multirobot Task Assignment via Consensus ADMM
Authors: Ola Shorinwa; Ravi N. Haksar; Patrick Washington; Mac Schwager
Paper link: https://ieeexplore.ieee.org/document/...
#TaskAnalysis #MultirobotSystems #DistributedAlgorithms
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:














![[Nature Communications] Snail-inspired robotic swarms](https://image.4k-video.ru/id-video/aNw92VlH3rA)




