Скачать
Quadcopter twitches - MultiWii default PID-settings (pitch)
Автор: Freakk174
Загружено: 2014-12-23
Просмотров: 470
Описание:
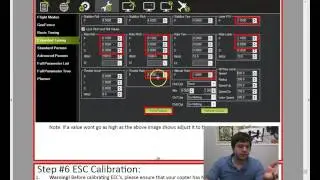
P = 3.3
I = 0.03
D = 23
When I-term is added into the equation (I-term != 0) the quadcopter starts to twitch/oscillate. However without I-term the quadcopter drifts towards tilted point.
In the current video, standard PID-settings are applied on pitch. All other axis are zeroed.
What can be wrong ?
See this thread for more information:
http://www.multiwii.com/forum/viewtop...
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: