Скачать
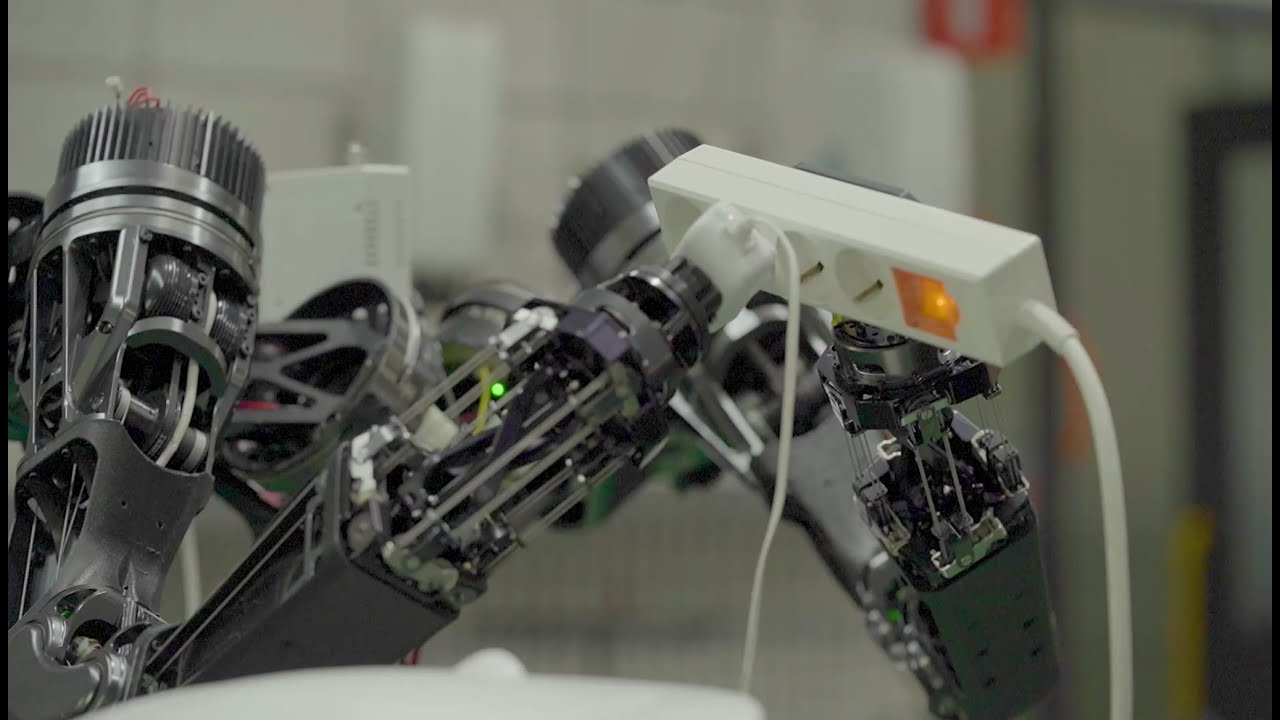
Bilateral teleoperation under time varying communication delay
Автор: BioRobotics Lab KUT
Загружено: 2011-01-12
Просмотров: 706
Описание: Stable bilateral teleoperation under time-varying communication delay based on time-domain passivity approach. For more information please visit http://robot.kut.ac.kr
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке:




![Пожалуй, главное заблуждение об электричестве [Veritasium]](https://imager.clipsaver.ru/6Hv2GLtnf2c/max.jpg)