Скачать
DH Cinemática direta Robótica e matriz jacobiana. parte 1
Автор: miguel Parra Muñoz
Загружено: 2021-11-08
Просмотров: 1913
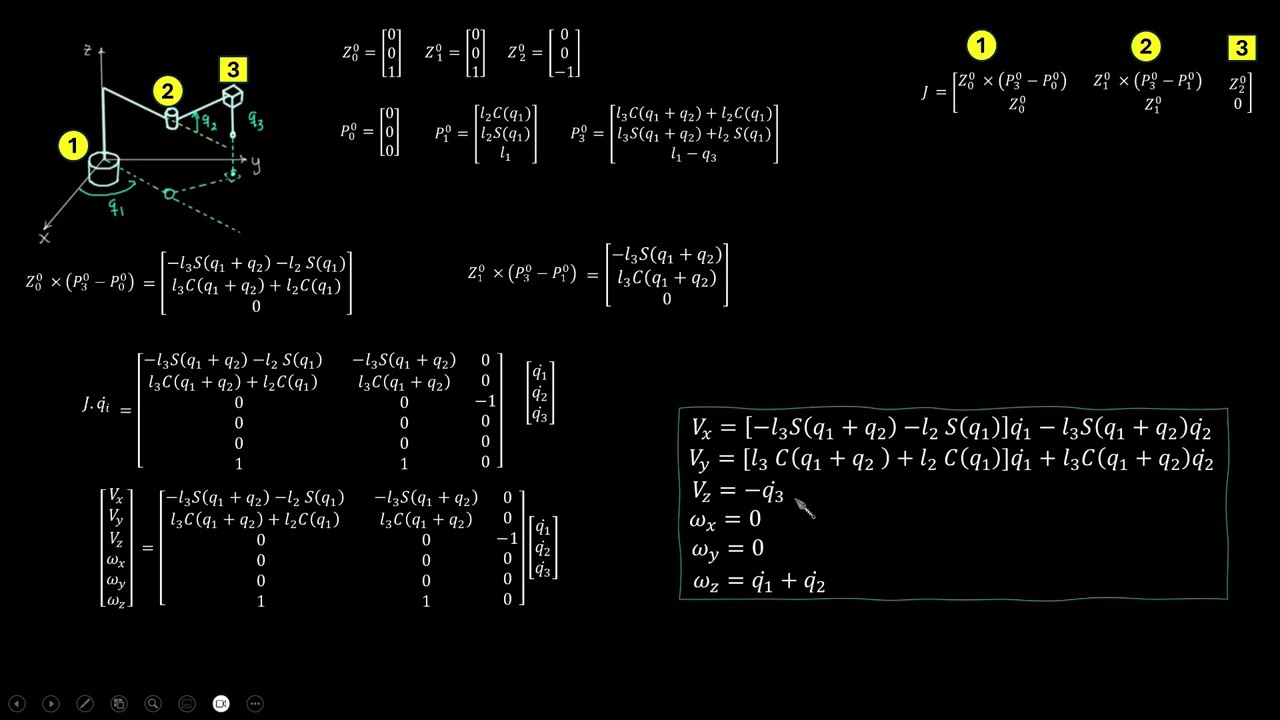
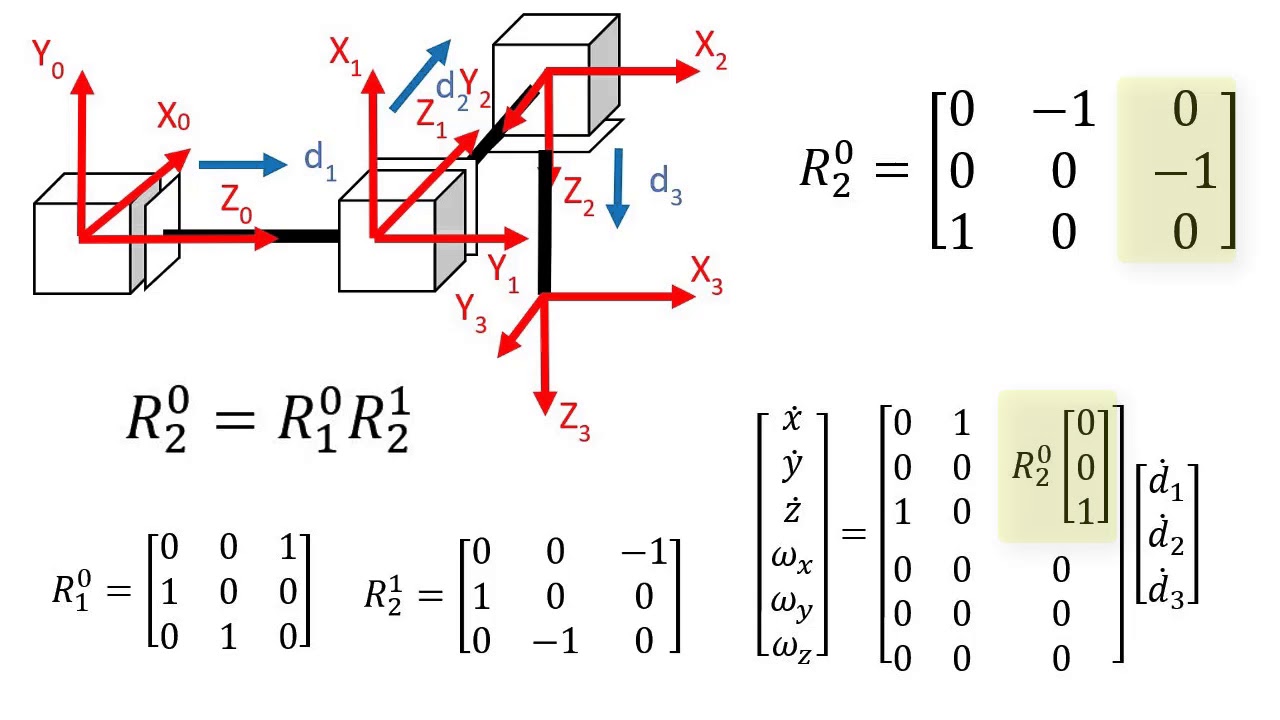
Описание: Se mostra um exemplo de como calcular a cinemática direta de um manipulador de 3 elos, a partir dos parâmetros de DH (Denavit–Hartenberg) e se calcula a matriz jacobiana para o manipulador.
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: