Why GRASP is a Game-Changer for Autonomous Navigation and Vision. Parallel Planning in World Models.
Автор: AI Podcast Series. Byte Goose AI.
Загружено: 2026-02-28
Просмотров: 106
Описание:
Most autonomous agents use World Models—internal simulations of the environment—to predict the future. However, traditional planning is usually sequential. If an agent wants to plan 50 steps ahead, it has to simulate step 1, then step 2, and so on.
This creates two major issues:
Computational Lag: It’s slow.
Vanishing/Exploding Gradients: In complex simulations, the mathematical "signal" used to improve the plan often gets lost or distorted over long sequences, leading to poor decisions.
The GRASP Solution: "Lifting" the Plan
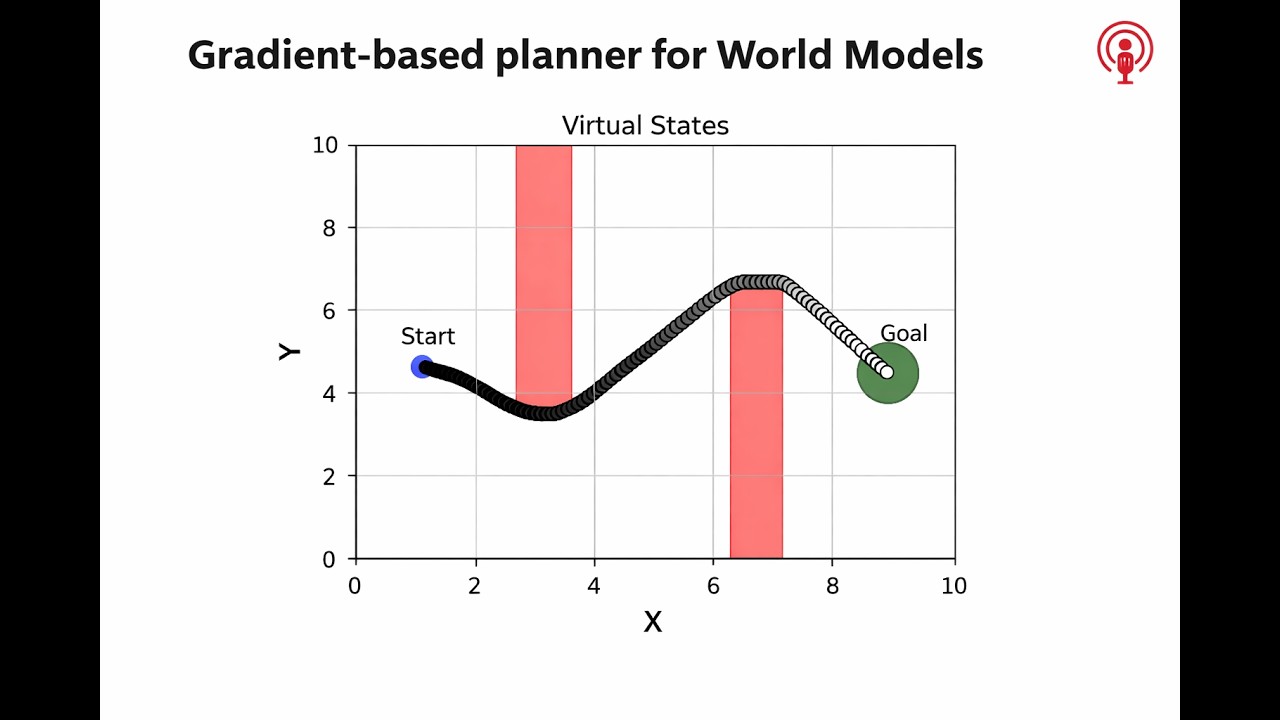
The researchers introduced a clever mathematical shift by "lifting" states. Instead of calculating one state based on the previous one, GRASP treats every state in a planned trajectory as an independent optimization variable.
Parallel Refinement: Because states are decoupled, the system can use gradient descent to refine the entire 50-step path simultaneously.
Gradient Detachment: To keep the math stable, the model selectively "detaches" certain gradients. This prevents numerical errors from cascading through the timeline.
Stochastic Exploration: By injecting controlled noise, the agent doesn't just find a path; it explores multiple possibilities to find the best path.
Повторяем попытку...
Доступные форматы для скачивания:
Скачать видео
-
Информация по загрузке: